Stellen Sie sich Ihre individuelle Projektübersicht zusammen.
Schlagwort: Biointelligente Wertschöpfung, Fahrzeugtechnologien
Fördermaßnahme: Biologisierung der Technik
Förderkennzeichen: 02P20E310, 02P20E311
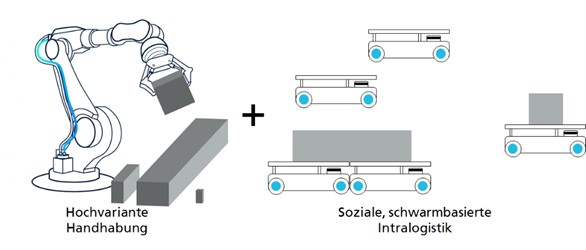
Forschungsziel: Ziel des Forschungsprojekts SwarmBot ist die Entwicklung einer hochvarianten Handhabung mit sozialen Transportroboterschwärmen, um Werkstücke mit unterschiedlicher Geometrie und Gewicht zu befördern. Dies soll durch eine Kombination gleicher Fahrzeuge, die sich analog der Ameisen auf ihren Straßen dynamisch zusammenfinden, um auch größere oder schwerere Materialien zu transportieren, realisiert werden.
Dr.-Ing. Danuta Seredynska
+49 721 608-22944
danuta.seredynska@kit.edu
Pflichtveröffentlichung: Nach Abschluss des Projekts finden Sie unter Angabe der oben genannten Förderkennzeichen (FKZ) oder unter Angabe des Projektakronyms unter www.tib.eu/de die detaillierte Pflichtveröffentlichung.
Problemstellung
Eine Ameisenkolonie ist ein faszinierender und überaus effizient organisierter Gesamtorganismus, der insbesondere eines perfektioniert: Transport von Material über weite Strecken. Die Zufuhr von Material und Werkstücken zwischen verschiedenen Fertigungsschritten stellt in der Industrie eine Herausforderung für eine effiziente Produktion dar. Dies gilt besonders für kleine und mittlere Unternehmen, bei denen sich oft vollautomatisierte Prozessschritte mit manuellen Arbeitsschritten abwechseln. Bisher erfolgt der Transport manuell, sei es durch die Montage- und Prozessfachkräfte selbst oder durch nur damit betraute Transportkräfte, bewerkstelligt. Eine Bandbreite großer und kleiner, leichter und schwerer Transportgüter zusammen mit häufig wechselnden Transportstrecken verhindern eine effiziente Automatisierung. Um automatisierten Transport auch für Unternehmen mit vielen verschiedenen Transportgütern und Strecken wirtschaftlich zu gestalten, braucht es möglichst wenige, gleichartige Fahrzeuge, die in der Lage sind, alle anfallenden Transportaufgaben wirtschaftlich zu meistern, um so die Fahrzeugauslastung zu maximieren.
Projektziel
Ziel des Forschungsprojekts SwarmBot ist die Entwicklung einer hochvarianten Handhabung mit sozialen Transportroboterschwärmen, um Werkstücke mit unterschiedlicher Geometrie und Gewicht zu befördern. Dies soll durch eine Kombination gleicher Fahrzeuge, die sich analog der Ameisen auf ihren Straßen dynamisch zusammenfinden, um auch größere oder schwerere Materialien zu transportieren, realisiert werden.
Vorgehensweise
Für ein flexibles, sich dynamisch anpassendes Intralogistiksystem werden Innovationen in drei Bereichen benötigt: In der selbstständigen Koordination der Bewegung dynamisch zusammenarbeitender Fahrzeuge; in der gemeinsamen Navigation individueller Fahrzeuge als eine Einheit; in der dynamischen Auswahl verfügbarer Fahrzeuge für jeden Transportauftrag. Dazu werden Regeln erarbeitet, nach denen an Hand der Größe oder mechanischen Stabilität eines Transportgutes die geeignete Art und Anzahl an Fahrzeuge berechnet werden kann. Es sind Algorithmen zu entwerfen, mit denen sich mehrere Fahrzeuge selbsttätig zu einer zum Transportgut passende Anordnung zusammenfinden und als eine Einheit manövrieren. Gleich einer „Schwarmintelligenz“ finden hier individuelle Systeme zueinander, um temporär für die Zeit einer konkreten Transportaufgabe nach außen wie ein einziges Individuum zu agieren und gleichzeitig nach innen, untereinander, permanent ihre Anordnung für Transportladung und Fahrsituation optimal auszubalancieren. Dabei wird das für die Navigation notwendige Umgebungsmodell von allen Fahrzeugen gemeinsam kontinuierlich umgesetzt und aktualisiert.
Ergebnisse und Anwendungspotenzial
Bei erfolgreicher Umsetzung besteht das Potenzial, die Systemkosten doppelt zu senken durch niedrigere Produktionskosten pro Fahrzeug und eine höhere Auslastung bei insgesamt weniger Fahrzeugen. Zudem können die entwickelten Innovationen in der Multi-Fahrzeug-Koordination und Navigation in weiteren Anwendungen als Bausteine für zukünftige intelligentere Roboterlösungen dienen. Die Regeln zur Fahrzeugauswahl abhängig vom Transportgut unterstützt das produzierende Gewerbe dabei, interne Logistikprozesse künftig zu optimieren.
In der folgenden Liste sehen Sie Ihre ausgewählten Projekt-Favoriten.