Stellen Sie sich Ihre individuelle Projektübersicht zusammen.
Fördermaßnahme: KMU-innovativ (bis 2015)
Förderkennzeichen: 02P14K550, 02P14K551
Forschungsziel: Ziel des Projektes ist die Entwicklung einer roboterbasierten Prüfeinrichtung zur zerstörungsfreien Prüfung der Verbindungstechnik von Rohkarossen im Automobilbau mittels Computertomographie. Eine Rohkarosserie aktueller Bauart weist bis zu 6000 Verbindungsstellen auf, die prozessbegleitend vollständig geprüft und bewertet werden müssen. Aktuell werden dazu Karosserien zerstörend geprüft, d. h. ausgewählte Prüfbereiche werden aufwändig präpariert und im Anschluss mit verschiedenen Techniken untersucht. Mit Vertretern verschiedener Automobilhersteller wurde die Entwicklung eines Prüfsystems diskutiert, welches sich hinsichtlich Automatisierbarkeit und Wirtschaftlichkeit deutlich von aktuell verfügbaren Systemen unterscheidet. Als Zielvorgabe wurde dabei die vollständige Prüfung der Verbindungstechnik einer Rohkarosserie innerhalb einer Woche formuliert.
Dr. Christoph Sauerwein +49 7532 4320-12
c.sauerwein@rayscan.eu
Dipl.-Ing. Andreas Gässler
+49 721 608-24240
gaessler@kit.edu
Pflichtveröffentlichung: Nach Abschluss des Projekts finden Sie unter Angabe der oben genannten Förderkennzeichen (FKZ) oder unter Angabe des Projektakronyms unter www.tib.eu/de die detaillierte Pflichtveröffentlichung.
Problemstellung:
Moderner Automobil- und Karosseriebau zeichnet sich u. a. durch eine Kombination aus einer Vielzahl verwendeter Materialien und verschiedensten Verbindungstechniken aus. Neben den klassischen Methoden wie Schweißen und Nieten sind das vor allem moderne Formen des Klebens, Heftens und Lötens. Eine Rohkarosse aktueller Bauart weist bis zu 6000 Verbindungsstellen auf, die zumindest prozessbegleitend vollständig geprüft und bewertet werden müssen. Zur Zeit werden überwiegend zerstörende Verfahren zur Prüfung verwendet, was neben dem erhöhten Arbeitsaufwand und dem Wertverlust einer vollständig gefertigten Karosse vor allem auch die Gefahr birgt, dass sich durch die Probenpräparation wesentliche Eigenschaften des Prüflings ändern.
Projektziel:
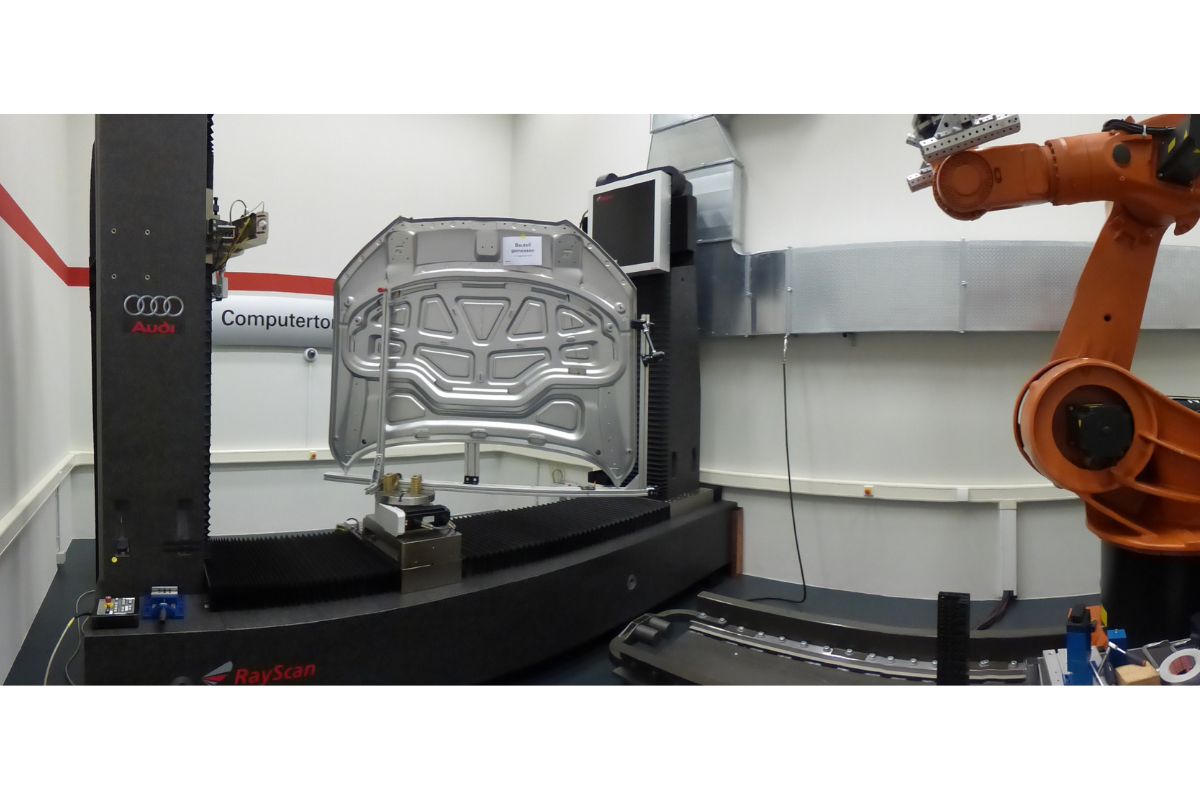
Die Computertomographie (CT) ist eine aus der medizinischen Bildgebung bekannte, zerstörungsfreie Prüfmethode, die sich auch im industriellen Umfeld etabliert hat. Im Projekt RoboTom wird ein CT System entwickelt, welches in Kombination mit der Flexibilität eines Robotersystems die vollständige, zerstörungsfreie Erfassung der Verbindungstechnik einer Rohkarosse innerhalb einer Woche (24/7) ermöglicht. Durch die entfallende zerstörende Probenpräparation werden die Messzeit je Verbindungselement und der Wertverlust minimiert. Gleichzeitig werden die Messergebnisse hinsichtlich Qualität, Reproduzierbarkeit und Durchsatz verbessert.
Vorgehensweise:
Der hier vorgeschlagene Lösungsansatz ist die erste konsequente Umsetzung einer nahtlosen Verzahnung von industrieller Robotik und hochaufgelöster Computertomographie. Dabei wird das CT System nicht wie bislang als stationär betrachtet, sondern kombiniert mit einem Robotersystem zur Prüfregion an die Rohkarosse geführt. Der Fokus liegt dabei auf maximaler Flexibilität.
Anwendungspotenzial und erwartete Ergebnisse:
Die Entwicklung von RoboTom bedeutet einen deutlichen Fortschritt in der automatisierten Überwachung von Produktionsprozessen im Automobilbau und wird ein neues Produktsegment bei RayScan begründen. Konstruktive Anpassungen an andere Produktionsprozesse (Automobil-, Luft- & Raumfahrtindustrie) sind möglich, so dass die technischen Erfolgsaussichten aufgrund des zukünftig steigenden Einsatzes von Robotik und der zunehmenden Automatisierung in anderen Branchen als sehr gut zu beurteilen sind.
In der folgenden Liste sehen Sie Ihre ausgewählten Projekt-Favoriten.