Stellen Sie sich Ihre individuelle Projektübersicht zusammen.
Fördermaßnahme: KMU-innovativ: Produktionsforschung (ab 2016)
Förderkennzeichen: 02P16K500
Forschungsziel: Ziel des KMU-innovativ-Projektes PaRo ist die Entwicklung eines neuartigen Palettenroboters, der rein elektromechanisch arbeitet und so auf eine „geschleppte“ Energieversorgung verzichten kann. Der Arbeitsbereich wird dadurch wesentlich vergrößert und flexibler. Die Produktivität, Verfügbarkeit und Energieeffizienz sollen optimiert werden.
Roland Stehr +49 2173 2805-600
stehr@duecker.com
Dipl.-Ing. Heike Menzel
+49 721 608-31479
heike.menzel@kit.edu
Pflichtveröffentlichung: Nach Abschluss des Projekts finden Sie unter Angabe der oben genannten Förderkennzeichen (FKZ) oder unter Angabe des Projektakronyms unter www.tib.eu/de die detaillierte Pflichtveröffentlichung.
Problemstellung
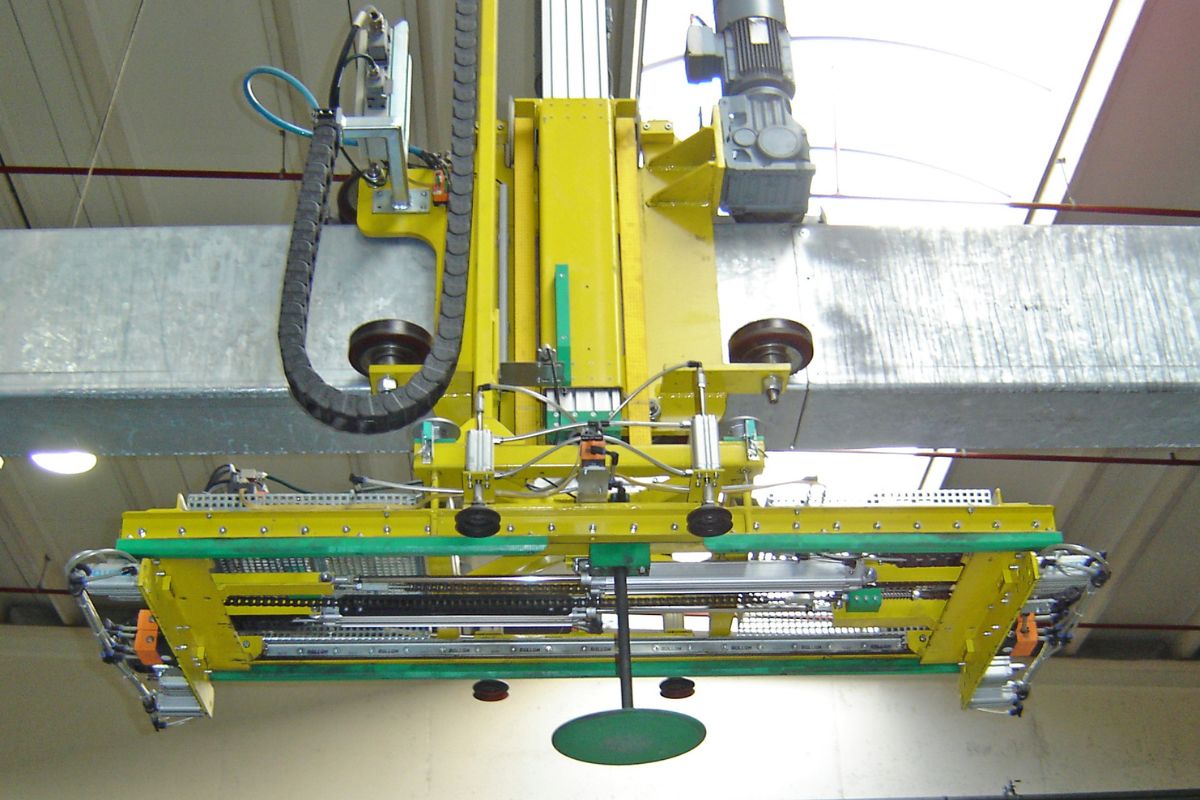
Der stark wachsende Versandhandel führt zu einem hohen Bedarf an Wellpappe-Produkten. Vorteile der Wellpappe sind beispielsweise deren Recyclingfähigkeit und Stapelbarkeit. Zu deren Herstellung sind hochproduktive und effiziente Verfahren notwendig, in denen Palettenroboter eine Schlüsselrolle einnehmen. Diese stellen an Beladestationen in einer Stunde bis zu 250 Paletten einschließlich Decklagen für den Versand von Wellpappe-Produkten bereit. Palettenroboter werden im industriellen Alltag pneumatisch gesteuert und angetrieben. Dadurch sind sie von einer schwerfälligen Energieversorgung abhängig und in ihrem Arbeitsbereich eingeschränkt. Zusätzlich sind Pneumatiklösungen störanfällig und wartungsintensiv.
Projektziele
Ziel des KMU-innovativ-Projektes PaRo ist die Entwicklung eines neuartigen Palettenroboters, der rein elektromechanisch arbeitet und so auf eine „geschleppte“ Energieversorgung verzichten kann. Der Arbeitsbereich wird dadurch wesentlich vergrößert und flexibler. Die Produktivität, Verfügbarkeit und Energieeffizienz sollen optimiert werden.
Vorgehensweise
Dazu werden neuartige elektromechanische Funktionseinheiten entwickelt und erprobt, beispielsweise für das berührungssensitive Greifen, Heben und Absetzen der Paletten. Dafür sind technologische Lösungen zur exakten Lage- und Größenerkennung erforderlich. Für das Saug-Greifen von Decklagen wird eine mitfahrende Unterdruckerzeugung entwickelt. Die Koordination der Vorgänge erfolgt durch eine integrierte Steuerung, die drahtlos mit der zentralen Anlagensteuerung kommuniziert und auf diese Weise einen autonomen Roboter darstellt. Die Funktionseinheiten werden zu einer modularen Gesamtkonstruktion zusammengeführt und durch ein neuartiges transport- und aufbauoptimiertes Schienensystem unterstützt. Durch die Kombination der Maßnahmen können so mehrere Roboter flexibel und hochproduktiv auf einem Schienensystem arbeiten. Das Gesamtsystem wird gebaut, erprobt und optimiert.
Ergebnisse und Anwendungspotenzial
Ergebnis dieser Entwicklung ist ein flexibel konfigurierbarer, hochproduktiver und hochverfügbarer Palettenroboter, der nach Projektende zur Serienreife entwickelt und vermarktet werden kann. In den ersten drei Jahren nach Projektabschluss sollen bis zu 60 derartige Roboter in den internationalen Markt eingeführt werden. Kenntnisse über die elektromechanische Realisierung der Bewegungsvorgänge werden in einen VDMA-Arbeitskreis eingebracht, um davon weitere Unternehmen profitieren zu lassen.
In der folgenden Liste sehen Sie Ihre ausgewählten Projekt-Favoriten.