Stellen Sie sich Ihre individuelle Projektübersicht zusammen.
Fördermaßnahme: KMU-innovativ: Zukunft der Wertschöpfung (ab 2023)
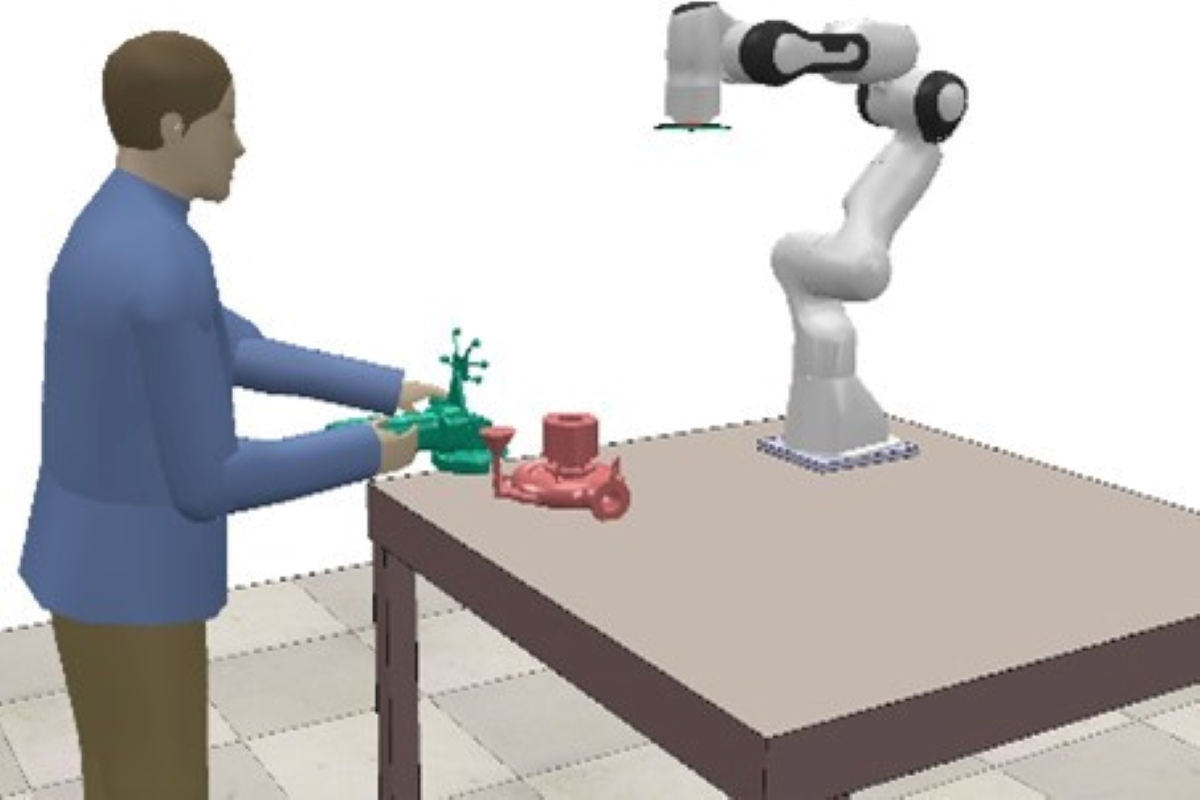
Forschungsziel: Forschungsziel: Im KMU-innovativ Projekt PANTOTEA soll der Nachweis für die prototypische technische Realisierbarkeit eines robotergestützten Verfah-rens zum Gussputzen erbracht werden. Das Ver-fahren basiert darauf, dass Mitarbeitende dem Roboter an einem realen Bauteil die Arbeitsaufgabe „pantomimisch“ durch Bewegung eines Dummy-Werkzeugs, ohne ein reales Werkzeug (z.B. Schneidscheibe), vorführen. Die Schneidscheibe (das Werkzeug) ist dabei so symbolisiert, dass der Mitarbeitende damit in der Lage ist, den Arbeitsvorgang zu simulieren. Die Position wird während dieser Bewegung kontinuierlich mit Kameras erfasst und in eine Roboter-bewegungsbahn übertragen. Der Bewegungsablauf des Roboters wird dadurch ohne Kenntnisse von Programmiertechniken, lediglich anhand der Kenntnisse der Mitarbeitenden und bei der früheren manuellen Tätigkeit gesammelten Erfahrungen, er-zeugt. Durch die Auswertung der erfassten Daten des Putzprozesses mittels einer KI-Anwendung wird zudem eine selbstlernende Optimierung angestrebt.
Thomas Fetzer +49 7424 96078-82
thomas.fetzer@autrob.de
Charlotte Frierson, M.A.
+49 721 608-24298
charlotte.frierson@kit.edu
Motivation
Das Entfernen von Gussgraten, das sogenannte „Gussputzen“, an Großgussteilen erfolgt heute manuell und ist für Mitarbeitende eine körperlich schwere und oft gefährliche Arbeit, weshalb auch das Personalangebot für diesen zwingend not-wendigen Prozessschritt stetig sinkt. Abhilfe kann grundsätzlich durch den Einsatz einer pantomimischen Roboter-Teaching-Technik ge-schaffen werden. Dabei kann das Expertenwissen der Mitarbeitenden motivationssteigernd genutzt werden, sofern das Anlernen des Roboters ohne Kenntnisse von Programmiertechniken möglich ist.
Ziele und Vorgehen
Im KMU-innovativ Projekt PANTOTEA soll der Nachweis für die prototypische technische Realisierbarkeit eines robotergestützten Verfah-rens zum Gussputzen erbracht werden. Das Ver-fahren basiert darauf, dass Mitarbeitende dem Roboter an einem realen Bauteil die Arbeitsaufgabe „pantomimisch“ durch Bewegung eines Dummy-Werkzeugs, ohne ein reales Werkzeug (z.B. Schneidscheibe), vorführen. Die Schneidscheibe (das Werkzeug) ist dabei so symbolisiert, dass der Mitarbeitende damit in der Lage ist, den Arbeitsvorgang zu simulieren. Die Position wird während dieser Bewegung kontinuierlich mit Kameras erfasst und in eine Roboter-bewegungsbahn übertragen. Der Bewegungsablauf des Roboters wird dadurch ohne Kenntnisse von Programmiertechniken, lediglich anhand der Kenntnisse der Mitarbeitenden und bei der früheren manuellen Tätigkeit gesammelten Erfahrungen, er-zeugt. Durch die Auswertung der erfassten Daten des Putzprozesses mittels einer KI-Anwendung wird zudem eine selbstlernende Optimierung angestrebt.
Innovationen und Perspektiven
Im Erfolgsfall liefert das Projekt einen Beitrag zum Erhalt des industriestrategisch wichtigen Prototypen-Kleinstserienbaus sowie der Einzel-stückfertigung in Deutschland. Die Ergebnisse können auf weitere Anwendungsfälle von körperlich stark belastenden Tätigkeiten unter schwierigen Arbeitsbedingungen übertragen werden, so dass diese Aufgaben künftig vielfach von automatisierten Strukturen ausgeführt werden können.
In der folgenden Liste sehen Sie Ihre ausgewählten Projekt-Favoriten.