
Energieeffiziente, flexible und wirtschaftliche Fertigungssysteme für Faserverbundwerkstoffe (EFFECTIVE)
Stellen Sie sich Ihre individuelle Projektübersicht zusammen.
Fördermaßnahme: Produktionsanlagen für Wachstumsmärkte - intelligent einfach und effizient
Förderkennzeichen: 02P14A160, 02P14A161, 02P14A162, 02P14A163, 02P14A164, 02P14A165, 02P14A166
Forschungsziel:
Ziel des Verbundvorhabens EFFECTIVE war die Entwicklung, Erforschung und Demonstration einer optimierten Produktionsanlage zur Bearbeitung von faserverstärkten Kunststoffen (FVK)- bzw. von Multimaterial-Werkstücken mit einem neuartigen, modularen Werkzeugmaschinenaufbau. Diese sollte den Anforderungen der FVK-Bearbeitung in besonderer Weise gerecht werden und herkömmliche Werkzeugmaschinen aus der Metallbearbeitung, die bisher für FVK-Anwendungen meist speziell umgerüstet werden müssen, hinsichtlich Kosten und Effizienz übertreffen.
Ansprechperson Projektkoordination
Ansprechperson bei PTKA
Dipl.-Ing. Michael Petzold
+49 721 608-31469
michael.petzold@kit.edu
Pflichtveröffentlichung: Nach Abschluss des Projekts finden Sie unter Angabe der oben genannten Förderkennzeichen (FKZ) oder unter Angabe des Projektakronyms unter www.tib.eu/de die detaillierte Pflichtveröffentlichung.
Problemlage
Faserverstärkte Kunststoffe (FVK), speziell kohlefaserverstärkte Kunststoffe (CFK), gelten als ein Hochleistungswerkstoff der Zukunft. Produktbeispiele sind die BMW i-Modelle mit kompletter CFK-Karosserie oder die Boeing 787 bzw. der Airbus A350 mit mehr als 50 % CFK-Anteil. Dabei stehen der stark steigenden Nachfrage bislang nur wenig geeignete Produktionsanlagen für die spanende Bearbeitung gegenüber. Werkzeugmaschinen sind hinsichtlich Genauigkeit und Steifigkeit überdimensioniert und bieten daher ein unzureichendes Kosten-Nutzen-Verhältnis. Gängige Industrieroboter sind dagegen zwar kostengünstiger und liefern zugleich eine große Flexibilität, jedoch unter großen Einschränkungen aufgrund der geringen Steifigkeit. Darüber hinaus müssen der Schutz des Arbeitsraums und empfindlicher Maschinenteile vor Staub sowie dessen gezielte Abführung bisher meist projektspezifisch als Sonderlösung entwickelt werden. Der Anteil manueller Arbeiten ist bislang relativ hoch, was sich negativ auf die Fertigungskosten von FVK-Bauteilen niederschlägt.
Zielstellung
Ziel des Verbundvorhabens war die Entwicklung, Erforschung und Demonstration einer speziell für die FVK-Bearbeitung entwickelten Produktionsanlage. Dazu sollten die Vorteile gängiger Industrieroboter mit den Vorzügen herkömmlicher Werkzeugmaschinen kombiniert und eine Absauganlage sowie der Schutz vor Staub in die Gesamtanlage integriert werden. Es war zudem geplant, auf der Demonstratormaschine Tests zur Bearbeitung von Aluminium durchzuführen. Bei erfolgreichen Tests könnte die Maschine auf einem breiteren Markt angeboten werden als für die reine FVK-Bearbeitung.
Vorgehensweise
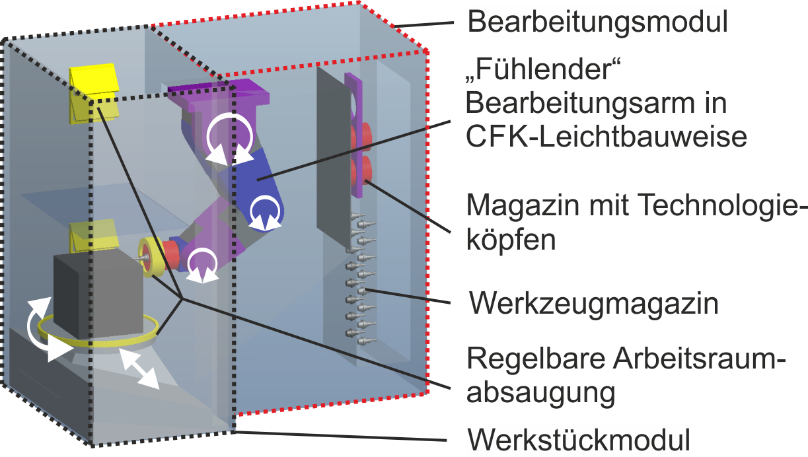
Es wurde ein Roboterarm zur effizienten und genauen Zerspanung von FVK und Aluminium entwickelt und in eine Demonstratormaschine integriert. Diese Maschine hat eine Steifigkeit, die zwischen der Steifigkeit von Industrierobotern und Werkzeugmaschinen liegt. Der Schwerpunkt bei der Konstruktion der Demonstratormaschine lag auf dem abgestimmten Verhältnis zwischen Genauigkeit, Steifigkeit, Dynamik, Leichtbau und Maschinenkosten. Zudem wurde eine Möglichkeit zum hauptzeitparallelen Rüsten der Maschine integriert, um zukünftigen Maschinennutzern einen hohen Automationsgrad zu ermöglichen. Es wurden neue Motor-/Lagereinheiten für einen gewichtsoptimierten Direktantrieb der vorderen Roboterarmachsen entwickelt. In den Grundachsen wurden Motoren mit gegeneinander verspannten Getrieben für einen spielfreien Antrieb eingesetzt. Zudem wurden im Roboterarm Kraftsensoren integriert, um die Kompensation von Prozesskräften zu erforschen. Es wurde eine eigens entwickelte Anlage zur Absaugung des bei der spanenden FVK-Bearbeitung entstehenden feinen Staubs eingesetzt. Die Absaugung erfolgte bedarfsgeregelt nah an der Bearbeitungsstelle. Des Weiteren wurde eine Geometrieerfassung mittels Laserscanner in die Maschine integriert. Diese ermöglicht die Einmessung der Werkstücke für eine adaptive Bearbeitung durch automatische Anpassung des NC-Codes an die vorliegende Geometrie und Aufspannlage des Werkstücks. Am Ende des Vorhabens wurden die Gesamtdemonstratoranlage sowie deren Teilsysteme verschiedenen Tests unterzogen.
Ergebnisse und Anwendungspotential
Die entwickelte Produktionsanlage hat eine relativ hohe Steifigkeit von über 5 N/µm, sodass in Versuchen auch Aluminium erfolgreich bearbeitet werden konnte. In diesen Versuchen zeigte sich auch eine zuverlässige und schnelle Absaugung des FVK-Staubs bzw. der Aluminiumspäne. Die Dynamik des Roboterarms und des Werkstückwechsels entsprach komplett den Anforderungen. Messungen zeigten, dass mit der Maschine eine Positioniergenauigkeit von 50 µm im Arbeitsraum erreicht werden kann. Gegenüber einer konventionellen Maschine mit vergleichbarem Arbeitsraum konnten die Kosten und der Verbrauch elektrischer Energie um mindestens 20 % reduziert werden.
Bei positiver Resonanz ausgewählter Kunden auf die Demonstratormaschine soll diese zur Serienreife weiterentwickelt und weltweit als neues Produkt angeboten werden. Damit würde zu einer kostengünstigeren Bearbeitung von Bauteilen aus FVK beigetragen werden. Auf Basis des modularen Aufbaus kann die Anlage darüber hinaus aufwandsarm skaliert und an weitere Technologien (z.B. Laserbearbeitung und 3D-Druck) angepasst werden. Die Projektteilergebnisse können zukünftig zur Verbesserung bestehender Werkzeugmaschinen weiterverwendet bzw. als Grundlage bei der Entwicklung neuer Systemlösungen genutzt werden. Dies stärkt die Themen Kostenreduzierung, Genauigkeitssteigerung, Energieeffizienz und Systemintelligenz im deutschen Maschinenbau.
- BCT Steuerungs- und DV-Systeme GmbH
- DMG MORI Pfronten GmbH
- INVENT Innovative Verbundwerkstoffe Realisation und Vermarktung neuer Technologien GmbH
- Leibniz Universität Hannover
- Ringler GmbH
- Schaeffler Industrial Drives AG & Co. KG
- Schaeffler Technologies AG & Co. KG
Ihre Favoriten
In der folgenden Liste sehen Sie Ihre ausgewählten Projekt-Favoriten.